 WHAT-什么是4D打印? 4D打印是一种在3D打印技术基础上发展而来的创新技术,它不仅能够制造出具有三维结构的物体,还能够让这些物体在时间维度(第四维度)上进行动态的形状或特性变化。4D打印的核心在于使用智能材料(如形状记忆聚合物、形状记忆合金、液晶弹性体等),这些材料在外界环境(如温度、湿度、光照、pH值等)的刺激下能够自发地发生形状、性能或结构的改变。例如,打印的材料可能在遇水后自我折叠、展开或移动,形成新的形态。 WHY-液态金属纳米颗粒(LMNPs)在3D打印中优势是什么? LMNPs在3D打印中具有许多独特的优势,特别是在提高材料性能和功能方面,包括优异的导电性和导热性、柔性与可拉伸性、自修复能力、低熔点,适合多种制造工艺、优异的界面调控能力、化学稳定性和生物兼容性以及广泛的设计自由度。其中,由于LMNPs可以轻松形成复杂的形状和结构,它们为3D打印提供了极大的设计自由度。它们能够与其他材料结合,实现功能集成的结构,如内嵌电路的机械部件。因此,LMNPs特别适用于制造智能电子设备、柔性器件、生物医学设备以及多功能复合材料等领域。它们不仅提升了材料的性能,还扩展了3D打印技术的应用范围和可能性。 HOW-可变形液态金属纳米颗粒实现的4D打印混合软机器人。 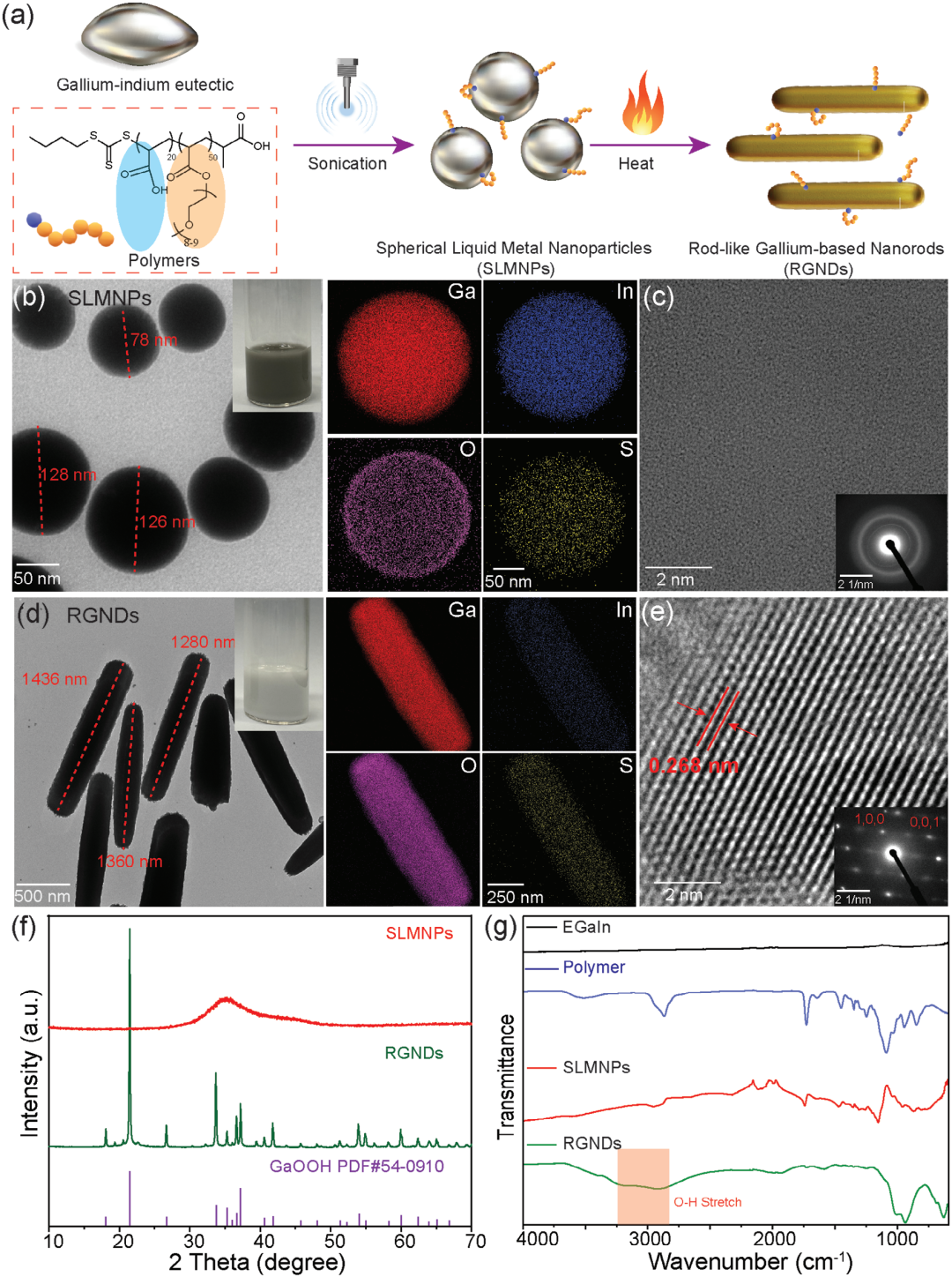 图1 可变形LMNPs的制备与表征 如图1a所示,通过超声波制备了球形液态金属纳米颗粒(SLMNPs),然后通过水热处理诱导形状转变以生成棒状镓基纳米棒(RGNDs)。同时,能量色散x射线能谱元素映射证实了来自SLMNPs的镓、铟、氧和硫信号的共域化(图1b)。高分辨率透射电子显微镜显微照片以及选择区域电子衍射分析表明,SLMNPs的原子排列是随机的,结构是无定形的(图1c)。TEM显微图显示,经水热处理48 h后,球形LMNPs完全转变为棒状,长度从≈110 nm显著增加到≈1.3 μm(图1d)。此外,RGNDs的HR-TEM图像显示空间为0.268 nm的晶格条纹(图1e),而快速傅里叶变换分析(插入图1e)显示六重对称。这些结果表明,RGNDs具有固体性质和晶体结构,而不是SLMNPs的液体性质和无定形结构。其他物化性质同样表明(图1f-g),SLMNPs和RGNDs在形貌、晶体结构、物质状态和化学成分方面存在实质性差异。 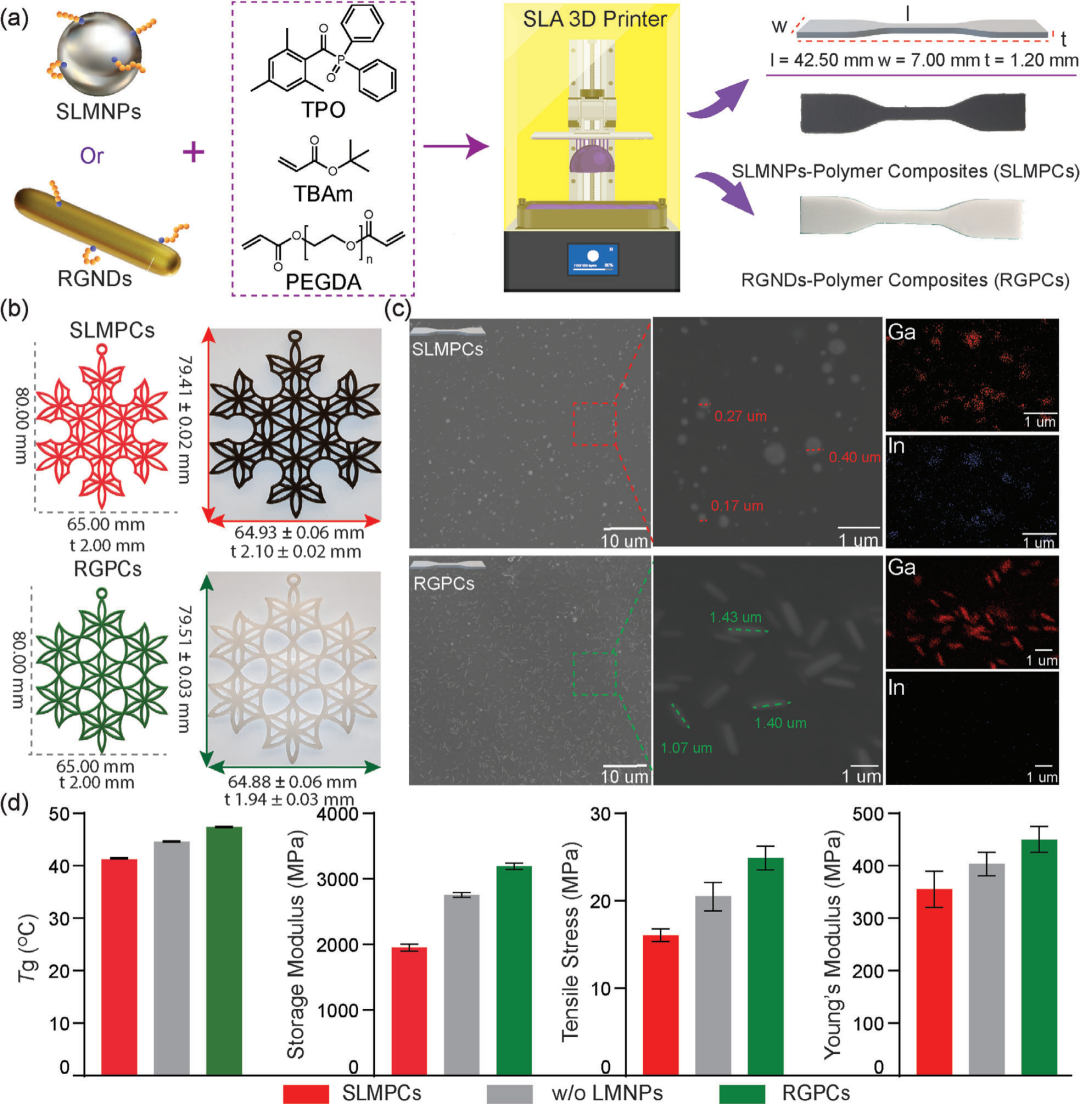 图2 纳米颗粒掺杂的3D打印物体的制备与表征 利用LMNPs的可变形特性,系统研究了可变形LMNPs在3D打印复合材料中的适应性。如图2a所示,以丙烯酸叔丁酯(TBAm)为主要单体,聚乙二醇二丙烯酸酯(PEGDA)为交联剂,二苯基(2,4,6-三甲基苯甲酰基)氧化膦(TPO)为光引发剂进行打印。SLMNPs和RGNDs能够成功集成到3D打印树脂中,以打印具有精确尺寸,表面光洁度和最小缺陷的标准拉伸试件。此外,SLMNPs和RGNDs能够进一步被加工成更加复杂的3D结构,如图2b所示的雪花图案,并且打印物体的尺寸与数字模型的规格很好地一致。如SEM和EDS所示,3D打印复合材料中分别分布均匀的SLMNPs和RGNDs,表明3D打印过程中具有良好的分散性和结构完整性(图2c)。同时晶体结构的棒状纳米颗粒的掺杂展现出了增强的机械性能(包括玻璃化转变温度、储存模量、拉伸应力和杨氏模量),从而提升了材料的刚性(图2d)。 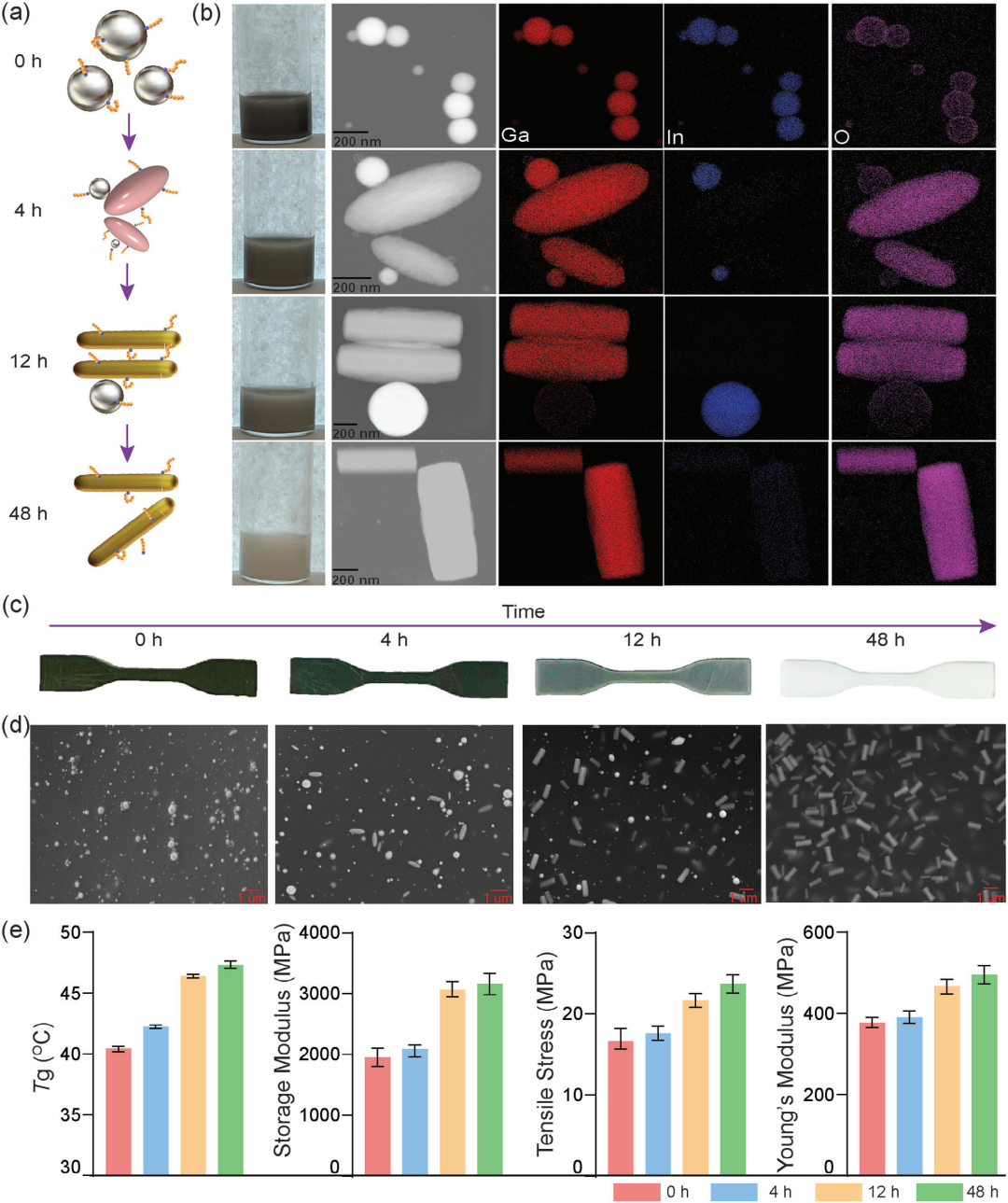 图3 LMNPs形状转变行为与3d打印GNPPCs力学性能的关系 进一步地,通过操纵LMNPs的形状转变过程来精确控制3d打印复合材料的力学性能。如图3a所示,只需改变水热处理时间,就可以精确调节SLMNPs的形状转变过程。水热处理4 h后,透射电镜观察到球形纳米颗粒(直径≈200 nm)和纺锤形纳米颗粒(长度≈800 nm)共存(图3b)。将不同处理时间的LMNPs集成到3D打印中以展示其性能。如图3c所示,经过不同处理时间,成功打印出含有1.5 wt.% LMNPs的标准拉伸试样。通过SEM图像验证了纳米颗粒在3D打印物体中的成功整合(图3d)。重要的是,SEM观察到的LMNPs的形貌与TEM图像相同,表明3D打印过程对纳米颗粒的形状和分散性没有显著影响。 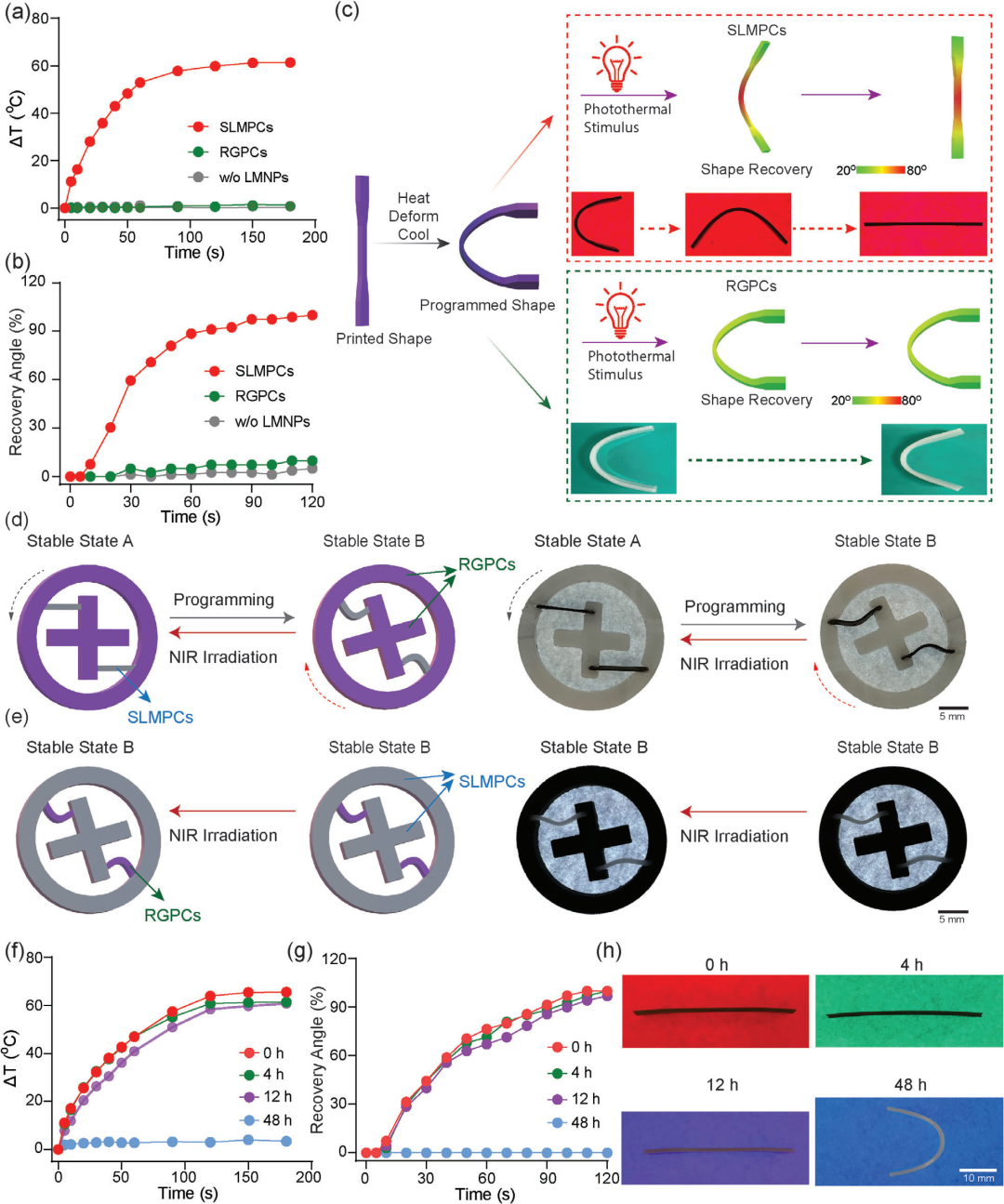 图4 NIR 响应的3D打印复合材料的4D打印 通过研究SLMNPs或RGNDs的3D打印对象的光热转换效率,进一步探索复合材料的4D打印能力。如图4a所示,3D打印的SLMPCs经过3min的NIR照射,温度显著升高至61.3°C,而RGPCs和不含LMNPs的3D打印聚合物的温度变化可以忽略不计。随后,探究了SLMPCs和RGPCs在近红外光刺激下的4D性能。SLMPCs的预定形状在2分钟内迅速恢复到原来的形状,恢复角达到≈98.7%(图4b-c)。这是因为当SLMPCs的温度超过Tg时,形状记忆聚合物从刚性和“玻璃”状态转变为柔性和“橡胶”状态,以恢复其原始形状。为了直接比较SLMNPs和RGNDs的4D可打印性,作者设计并打印了旋转双稳态器件,如图4d-e所示。SLMNPs作为旋转铰链,可以在40秒内实现内十字的旋转和扭转传递。相比之下,另一种具有相反成分材料的旋转双稳态器件失去了形状恢复,并且更耐扭转,因此很难编程到相同的旋转角度。此外,还验证了不同处理时间下含有LMNPs的GNPPCs的4D打印性能(图4f-h)。上述结果表明,可变形LMNPs在3D打印材料的光热和4D打印能力中起着至关重要的作用。 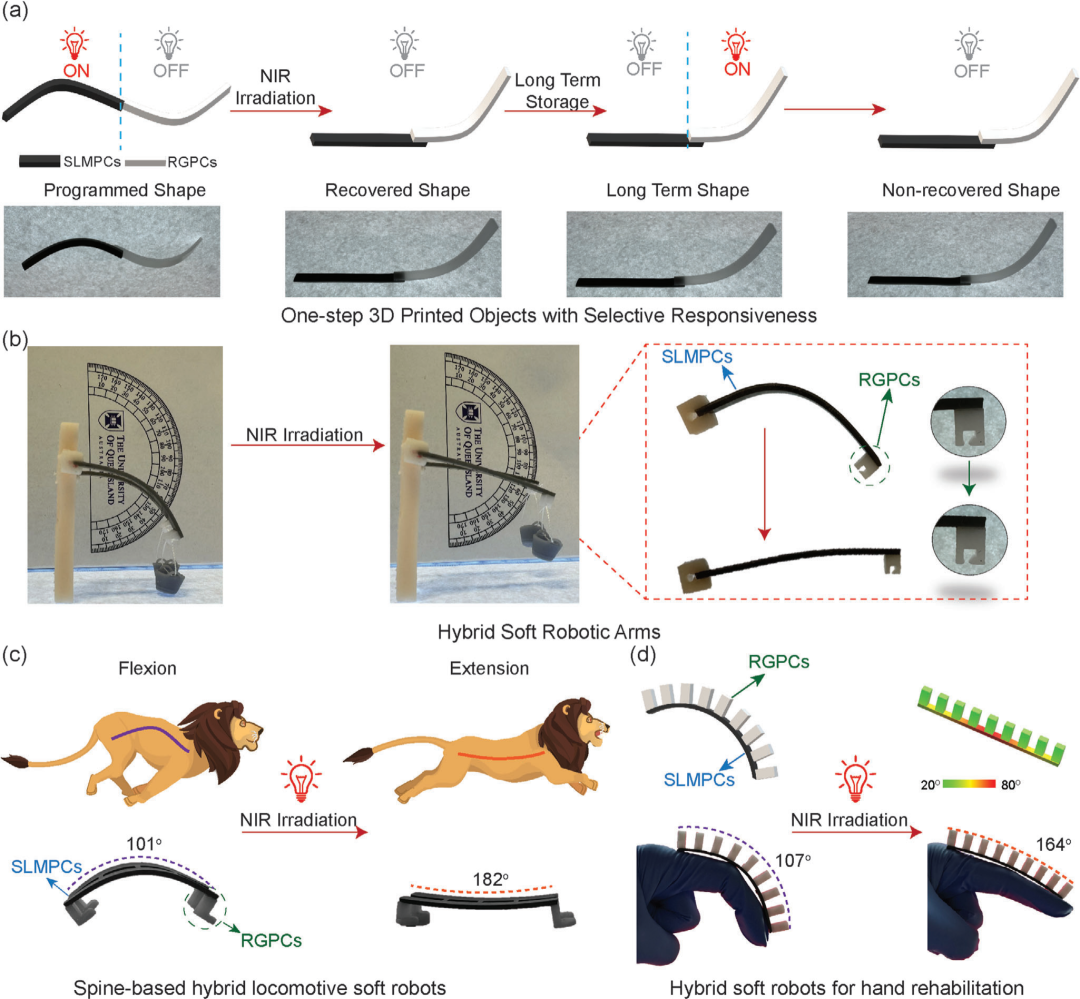 图5 一步式3D打印混合软机器人的应用 利用基于SLMPCs和RGPCs的“软”和“硬”机器人的优势,以及各自的“开”和“关”光热效应,通过直接一步3D打印的方法,成功地将SLMPCs和RGPCs集成在一起,制作了混合软机器人系统,如图5a所示。首先,展示了软机器人系统作为人工手臂,机车软机器人,甚至是手部康复的辅助医疗设备。如图5b所示,通过将SLMPCs和RGPCs分别打印成不同的部位来制作机器人上肢。经过近红外照射,编程臂迅速恢复到变形前的状态,使其能够有效地举起物品。随后,创新地设计和制造了一个机车软机器人(图5c),其中SLMPCs模拟柔性肌肉,而RGPCs提供结构支持。具体来说,基于SLMPCs的肌肉能够通过近红外光介导的形状变形来模仿四足哺乳动物的运动,而固体RGPCs在整个运动过程中提供坚定的支持。在医疗领域,软体机器人通过适应人体,在外科手术和辅助任务中表现出了非凡的能力。因此,开发设计了基于HGNPCs的软机器人作为手部康复的外部支持医疗设备。如图5d所示,SLMPCs经过精确编程,以模仿人类手指的自然弯曲度,弯曲角度为107°。这些软机器人作为可穿戴设备,通过利用近红外光介导的形状恢复,在帮助受损手指恢复方面非常有效。此外,RGPCs组件在防止过度弯曲方面起着至关重要的作用,从而降低继发性骨损伤的风险。 结论:通过操纵LMNPs的形状变换,为4D打印混合软机器人创建了一个具有控制机械性能的多功能材料工具包。这种软硬结合的混合型软机器人是通过直接一步3D打印方法制造的,可以定制几何设计和快速数字化制造,人工干预最少。将形状可变形的LMNPs集成到3d打印的GNPPCs中,对打印速度的影响最小,同时可以精确控制3d打印对象的机械性能。LMNPs的光热特性赋予3d打印物体在4D打印过程中的形状记忆特性。GNPPCs在力学性能和光热性能上的差异为制造具有复杂功能和移动能力的混合软机器人提供了途径。通过使用3D打印一步直接制造,设计和制造了可以举起物体,模仿哺乳动物运动和康复医疗设备的混合软机器人。由于易于制造和广泛的适用性,作者设想开发的GNPPCs将有可能彻底改变混合软材料领域,从而加速软机器人技术的创新。 文章来源: https://doi.org/10.1002/adma.202409789 撰稿人: 陈龙 审核人:李泽庆 终审人:巢妍霞 欢迎关注,获取更多消息 |